

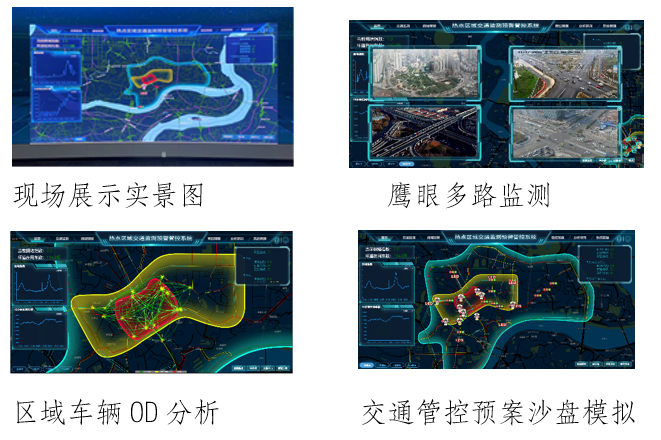
所属领域:交通安全 成果简介针对城市热点区域拥堵严重、管控过度、管控措施滞后、协同管控困难等问题,充分挖掘已有交通基础数据,研发集数据治理、状态监测、拥堵预警、管控预案于一体的“城市热点区域交通监测预警管控系统”,实现针对一个区域、依托一个系统的一体化管理。主要应用于城市商圈、网红景点、会展场馆、大型园区等热点区域的交通运行监测预警管控。技术特点:1、数据精确治理:评估优化现有设备检测精度,开...
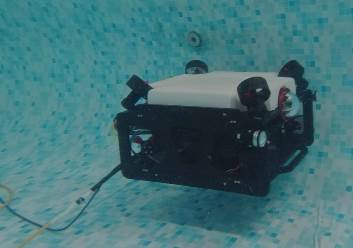
ROV水下机器人所属领域:机电工程智能制造 成果简介本团队针对工业市场中的水下桥梁、水库堤坝检测,救助打捞,水产养殖等领域客户需求,开发出了第二代水下机器人。产品由水下机器人本体和地面工作站两部分组成,通过脐带电缆建立两者间的通信联系。该水下机器人拥有自主悬停、定向定航、水下识别、图像增强等技术。可通过搭载水下机械臂、水下焊枪、水下声呐等仪器,以适应桥梁检测、水下打捞、水下摄影等作业场景。技术特点...
GT125(垂起飞车)科研样机研制所属领域:交通安全 成果简介:本项目针对国内外市场需求,聚焦绿航院“敏捷绿色航空”的发展主线,开展单座轻型分体式多旋翼飞行汽车研制。飞行汽车以氢能为主要能源,驱动电机为动力,八组旋翼驱动,乘员1人,最大起飞重量655kg,飞行航程大于30km。该项目由绿航院独立开发,按项目计划完成氢能垂起飞车的设计、样机制造与试飞。各部门按照拟定的设计输入开展设计制造,完成氢能垂起飞车...

自动驾驶与智能CDC减震系统自动驾驶与智能CDC减震系统,是一种开放式、可拓展、可升级的L3级智能车软硬件系统架构。系统综合考虑功能的模块化与交互集成,建立感知、决策规划、控制、执行等子单元模块,同时增加诸如人机交互和信息交互功能模块,实现数据读写、日志记录、人机交互等功能,使硬件的接入和软件的升级改造易于实现,从而有助于开发和验证自动驾驶系统的环境感知等算法。在传统CDC减震器硬件架构上,增加摄像头或低...
成果简介:沙漠土壤化项目由重庆交通大学易志坚副校长团队,历时8年研制成功。“沙漠土壤化”技术是指采用力学方法使沙子同时获得土壤力学属性和生态属性,即向沙子颗粒之间施加万向结合约束(一种让沙子一分钟变成土壤的低成本无毒自降解的植物性纤维粘合剂约束材料),使沙子具有保水、保肥和透气等特点进而成为植物生长理想载体的一种快速沙漠生态恢复技术,这项技术为人类治理沙漠、恢复生态、获得良田沃土提供了一种新的选...

电话:023-62312923
邮箱:gccyy@cqjtu.edu.cn
地址:重庆市南岸区学府大道66号重庆交通大学第二教学楼523
版权所有©️重庆交通大学-工程与产业研究院
