

敏捷绿色长航时无人机所属领域:低空无人机 成果简介敏捷绿色长航时无人机综合运用高效气动外形优化设计、一体化结构设计制造、分布式动力系统、飞控/动力系统综合控制等新技术,实现了无人机绿色、敏捷、低成本等核心设计目标。该无人机采用垂直起降技术,能够在复杂地形环境下实现全自主起降,并通过模块化动力系统设计,可在纯电动、油电混动、氢能源等多种动力系统之间便捷切换,以适应不同的应用场景需求。该无人机有效载...

交通事故主动防控理论、技术、和装备 成果简介徐进教授的团队开展了大规模的山地道路车辆运行参数和驾驶数据采集,获得了山地道路的驾驶行为偏好,建立了驾驶行为特征谱。基于对真实驾驶行为本质的深刻理解,提出了“视窗”概念和“前视断面选点”的驾驶预瞄理论,建立了典型驾驶模式的“轨迹-速度”协同规划模型,设计了模拟真实驾驶过程的滚动时域高效求解算法,实现了复杂路形驾驶行为动态决策,解决了山地复杂道路/复杂赛道...

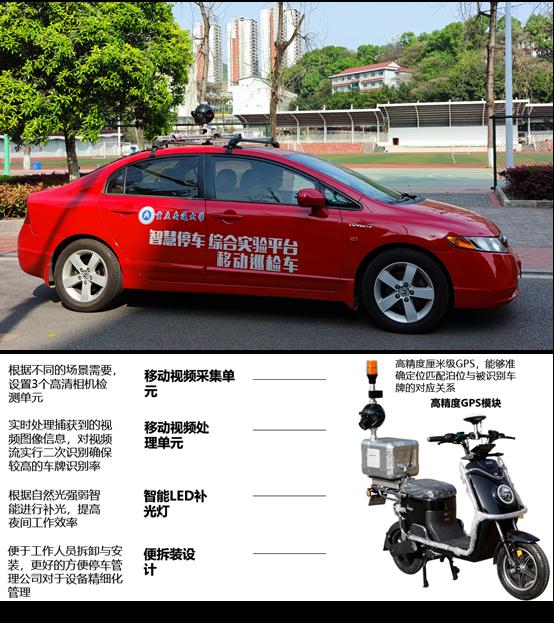
交通智能机器人理论、技术和装备所属领域:交通大数据 成果简介曾超教授的团队针对目前路内停车场存在智能化程度低、人工管理成本高等问题,研发了视频移动巡检车。视频移动巡检车通过集成移动视频采集单元等先进模块,实时处理捕获路内车位信息,准确定位泊位与车牌,实现单车设备管理300个泊位。大幅降低人工成本、显著提高停车收费率。为提升城市交通管理水平起到积极促进作用。
宁夏公路桥梁健康管理大数据云平台所属领域:电子信息、互联网 项目联系人:杨建喜 成果简介为改进传统桥梁健康监测和信息管理系统数据“孤岛化”局面,充分挖掘数据价值并提升桥梁管养智能化水平,区域化公路桥梁健康管理大数据云平台实现了桥梁基础信息、各类检测、病害、养护措施、健康监测等多源异构数据集成,构建了桥梁各类业务数据集中化管理和多维统计分析功能体系,并从桥梁健康监测数据挖掘、典型病害、技术状况劣...

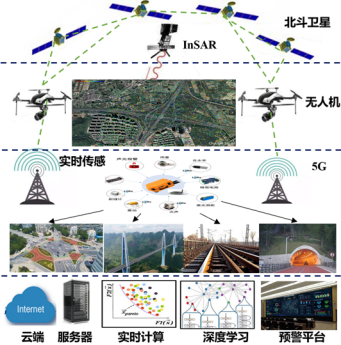
北斗+空天遥感的交通基础设施结构安全监测预警所属领域:大数据 成果简介融合星基和天基遥感监测监控,结合北斗高精定位、数字孪生技术,实现对交通沿线基础设施结构安全从隐患排查到靶区监控,再到高频次、高精度实时监测和前置预警的一体化技术,为大范围的交通基础设施结构安全隐患快速定位、实时监控、结构安全“虚拟-现实”数字孪生交互式监控预警服务。成果图片
电话:023-62312923
邮箱:gccyy@cqjtu.edu.cn
地址:重庆市南岸区学府大道66号重庆交通大学第二教学楼523
版权所有©️重庆交通大学-工程与产业研究院
