ROV水下机器人
所属领域:机电工程智能制造
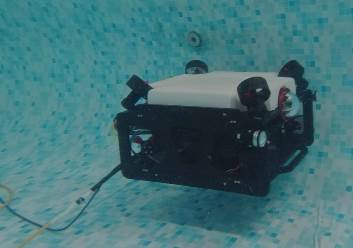
成果简介
本团队针对工业市场中的水下桥梁、水库堤坝检测,救助打捞,水产养殖等领域客户需求,开发出了第二代水下机器人。产品由水下机器人本体和地面工作站两部分组成,通过脐带电缆建立两者间的通信联系。该水下机器人拥有自主悬停、定向定航、水下识别、图像增强等技术。可通过搭载水下机械臂、水下焊枪、水下声呐等仪器,以适应桥梁检测、水下打捞、水下摄影等作业场景。
技术特点:
1、灵活性强:多自由度的移动能力可自如应对水下环境的复杂多变;
2、续航时间长:通过电缆供电的水下机器人基本没有作业时间的限制;
3、作业半径大:水下机器人可以覆盖大面积的检测工作任务,并且潜水员下潜深度不宜超过50 m,而水下机器人作业深度可达100 m以上;
4、安全性高:在水库中ROV检测不受水深限制,克服了潜水员常规潜水的深度限制,避免了人员安全事故的发生;
5、效率高:水下机器人利用脐带缆进行供电,操作人员在岸上进行操作,高清摄像机实时提供水下情况,水下机器人可长时问在水下工作,提高了检测效率;
6、操作简单:通过手柄控制水下主机的姿态和检测仪器工作,操作简单,而且框架式的结构便于搭载检测设备。


遥控无人潜水器 第二代上位机视频及数据显示


