山地道路条件操纵行为特征以及驾驶负荷量化方法
所属领域:交通安全
成果简介
急弯路段、陡坡路段、隧道洞口、以及弯坡组和路段是山地道路网络中的高风险区域,驾驶人操纵行为数据是确定道路和互通立交几何线形参数的直接依据,决定了道路建成后的车路协调性。本研究所基于海量实车驾驶试验数据并结合极限状态仿真试验,获得了典型路段上的转向行为参数和速度控制行为参数,分析不同驾驶模式下高风险路段的转向盘操作特征和踏板操纵特征、车辆纵向和横向加速度特征以及姿态特征,完成了驾驶操纵模式聚类与识别,构建了高风险路段的驾驶操纵行为特征谱,揭示和证实山区行驶环境下“道路线形→驾驶操纵→驾驶负荷”的传递链,提出了抗环境扰动的驾驶操作优化方法。
系列研究成果发表论文20余篇,其中SCI/EI期刊论文10余篇,入选ESI高被引论文1篇(2018年);另一篇代表性论文“Acceleration and Deceleration Calibration of Operating Speed Prediction Models for Two-Lane Mountain Highways”自2017年6月以来长期居于该期刊Journal of Transportation Engineering的Most Read论文,下载量截至目前近3000次。系列研究成果补充并完善了山区道路路线设计理论,揭示了山地道路的车-路耦合状态,为线形参数指标控制、运行速度模型参数标定、以及山地道路环境智能汽车拟人化决策提供了关键参数和基础数据支持。
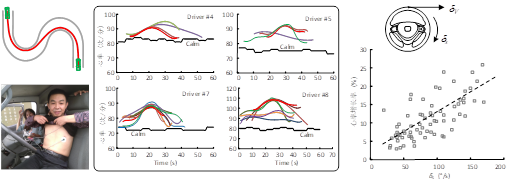
图1 曲线路段转向操纵量与驾驶人生理指标的相关性
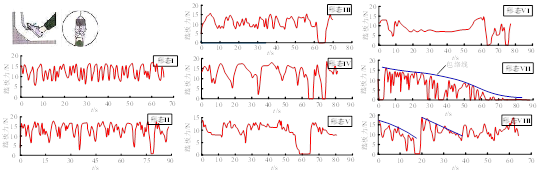
图2 弯坡组合路段的踏板力使用行为模式聚类


