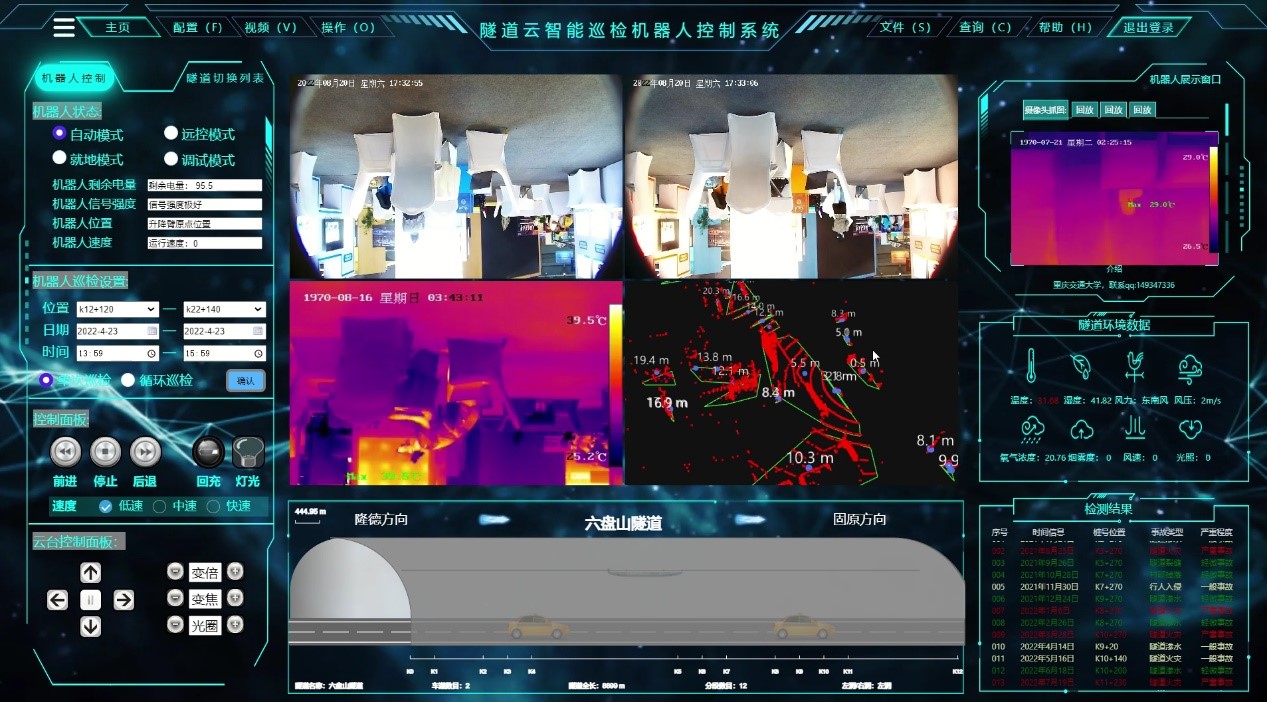
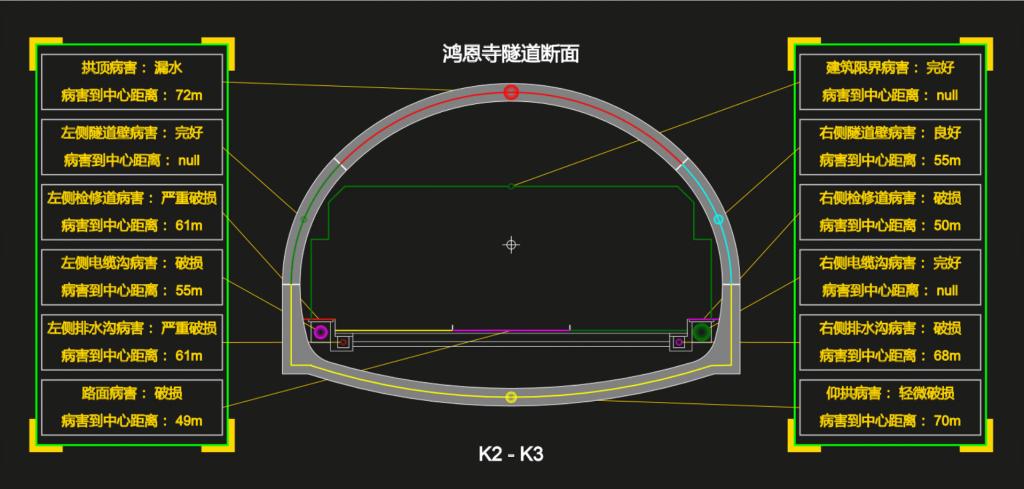
首次提出基于云-边超协同、边-端强交互的一体化云边端协同巡检技术与方法,通过红外、可见光、激光雷达以及超声波等传感器的AI超融合,突破了多源协同感知的大数据决策难题,可在预先铺设的轨道上实现隧道结构病害(裂损、渗漏水等)、机电系统(风机、照明、消防等)和交通运营(交通事故、异常驾驶行为、火灾及违章停车等)等安全状况进行日常巡检以及应急救援。
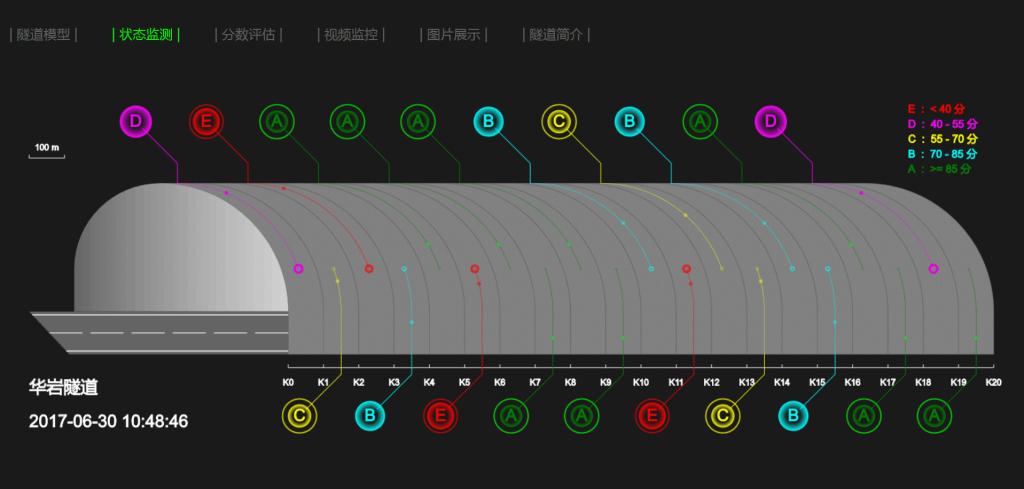
项目首次将巡检机器人技术应用于隧道巡检,突破了高速移动状态下对多目标的精准识别与即时预警技术,先后将巡检机器人应用于宁夏青兰高速上的六盘山隧道,重庆奉建高速上的小营隧道、广西桂柳高速山口隧道等,其中,宁夏自治区境内六盘山隧道双侧长达18公里,采用四台机器人并网运行已超过1年四个月,核心技术得到测试和提升,应用效果得到使用单位的一致认可、填补了行业空白。自主研发的机器人以及软件系统全面通过了CMA以及CNAS监测认证,围绕项目内容申请发明专利25项;软件著作权登记15项;发表高水平论文20篇;出版专著2本。